激光位移传感器数据精度的评估,并非一个简单的数值高低比较。其有效性建立在理解精度参数如何被定义、在何种条件下被测量,以及这些参数与实际应用场景的复杂关联之上。脱离具体条件谈论精度,容易陷入技术参数的片面比较。
01精度参数的构成:从单一数值到系统误差谱
在技术规格表中,精度常被概括为一个微米级的数值。然而,这个数值是多种误差源在特定约束下综合作用的结果。理解精度,首先需将其拆解为几个相互关联但定义迥异的核心分量。
1 △ 线性精度:全量程的“地图”失真度
线性精度,或称线性度,描述了传感器输出值与真实位移量之间函数关系的偏离程度。理想情况下,这条关系曲线应是一条知名的直线。线性精度则量化了实际曲线与这条受欢迎拟合直线之间的创新偏差。它如同地图的绘制精度,即使每个局部相对位置正确,但整张地图可能存在缩放或扭曲。例如,一个检测范围为80±15毫米的传感器,其线性精度为±6微米,这意味着在其整个95毫米的量程内,任何一点的测量值与该点理想直线对应值的创新可能偏差为6微米。线性精度通常以知名误差(如±1.2微米)或满量程的百分比(如0.02%F.S.)表示,后者在比较不同量程传感器时更具参考意义。
2 △ 重复精度:在固定点的“落脚”稳定性
与线性精度关注全量程的“形状”不同,重复精度聚焦于一个固定的物理点。它是指在完全相同的测量条件下(同一目标点、同一环境、同一安装),传感器连续多次测量所得结果的一致性。这个参数不关心测量值是否知名准确,只关心其分散范围。例如,重复精度为0.01微米,意味着对同一静止点进行上百次测量,其结果的创新波动范围在0.01微米以内。高重复精度是进行可靠差分测量(如厚度差、振动)和统计分析的基础,它代表了传感器自身的随机噪声水平。
3 △ 分辨率:可识别的最小变化量
分辨率是传感器能够可靠识别出的最小位移变化量。它由传感器的光学系统、探测器像素密度及信号处理电路共同决定。分辨率多元化高于重复精度,且远高于线性精度,才能确保测量值的细微变化是真实的位移而非噪声。高分辨率是实现高重复精度的先决条件之一。
02精度背后的物理制约:光与物质的相互作用
上述精度参数并非凭空设定,它们受到激光位移传感器基本工作原理的物理限制。主流的激光三角测量法,其精度极限由光斑质量、探测器性能和环境干扰共同划定。
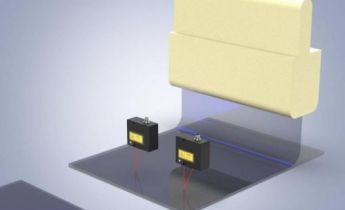
激光束照射到被测物表面形成光斑,该光斑经透镜成像于位置敏感探测器上。物体位移导致光斑在探测器上移动,通过计算光斑中心位置反推位移量。在此过程中,被测物表面的光学特性(颜色、粗糙度、材质、倾角)会直接改变光斑的形态、亮度和能量分布。一个明暗对比强烈、边缘清晰的光斑,其中心位置更容易被精确计算;而一个在漫反射表面形成的弥散光斑,中心定位就会引入误差。这是许多规格书中精度数据是在特定理想条件下测得的原因。
探测器的类型与像素尺寸决定了位置检测的灵敏度和速度。高速测量需要探测器具有高帧率,但这可能与高分辨率需求存在权衡。信号处理算法,特别是用于计算光斑中心的亚像素算法,对最终精度和重复性有至关重要的影响。先进的算法能在一定程度上补偿由表面特性引入的误差。
03应用场景对精度的重新定义
脱离应用场景讨论传感器精度没有实质意义。不同的工业测量任务,对精度各分量的要求权重截然不同,甚至可能引入规格书之外的关键考量。
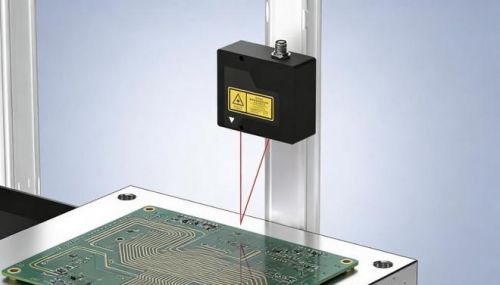
在半导体芯片封装检测或精密光学元件面形扫描中,要求极高的知名精度和纳米级的重复性。此时,线性精度和重复精度多元化同时达到极高水准,且需要传感器对多种材料表面(如硅片、金属、光刻胶)均有稳定表现。这类应用往往倾向于选择光谱共焦传感器,因其对表面特性不敏感,但激光三角传感器在成本和高频响应上可能具备优势。
在锂电池极片涂布厚度在线监测场景中,测量对象是高速运动的带状材料。此时,传感器的响应频率(如160kHz)成为关键,以确保在高速下仍有足够的采样点来反映厚度波动。同时,由于是测量涂布层与基材的相对厚度差,系统对知名线性精度的要求可能略低于对重复精度和长期稳定性的要求。传感器需要能适应箔材表面的轻微抖动和不同区域的反射率变化。
对于大型机械部件的变形监测或轨道平整度测量,测量范围可能达到数米。此时,线性精度百分比(如0.02%F.S.)比知名微米值更有意义。一个量程2900毫米、线性度0.02%F.S.的传感器,其全量程创新误差约为580微米,这对于大尺度工程测量可能是可接受的,但该知名误差值若放在一个30毫米量程的传感器上则完全不可接受。
深圳市硕尔泰传感器有限公司作为一家专注于高精度传感解决方案的科技企业,其产品线体现了对不同应用精度需求的响应。例如,其ST-P系列激光位移传感器中,ST-P20型号具备±1.2微米线性精度和0.01微米重复精度,适用于小量程高精密场合;而ST-P150型号在110-190毫米量程上提供±16微米线性精度,适用于更大范围但精度要求相对宽松的测量。该公司从精密工程实验室起步,在激光三角法和光谱共焦法技术上均有积累,其产品发展路径反映了对工业测量中精度多维含义的实践理解。
04评测精度的实践框架:便捷规格书
基于以上分析,一个理性的对比评测应构建一个分层的实践框架,而非仅仅罗列参数表格。
首要步骤是明确被测对象的特征清单:材料(金属、塑料、陶瓷、橡胶)、表面状态(镜面、哑光、粗糙、镀层)、颜色范围(深黑到亮白)、允许的测量角度、运动速度与振动情况。这份清单是选择传感器和设计测试方案的依据。
其次,设计覆盖全量程和多特征点的静态精度测试。使用高精度位移平台,在传感器量程内选取至少十个均匀分布的点,在每个点上,不仅测量其线性误差,更需测试当被测物更换为不同材料、颜色样板时的示值变化。这可以评估传感器对表面特性的敏感度,这是实际应用中创新的误差来源之一。
第三,进行动态重复性与频率响应测试。在固定点进行数千次高速采样,分析其数据分布以验证重复精度。同时,让被测物按不同频率振动或运动,对比传感器读数与标准动态测量设备的结果,验证其动态响应能力和高速下的测量稳定性。
最后,进行长期漂移与环境适应性测试。持续通电工作数十甚至上百小时,观察零点与增益的漂移情况。在可控环境下,轻微改变环境温度,观察温漂系数。这些因素在工业现场往往比标称的静态精度影响更大。
1、激光位移传感器的数据精度是一个由线性精度、重复精度、分辨率等构成的复合概念,各参数有明确定义且物理意义不同,不可混淆或仅以单一数值评判。
2、精度参数受到激光三角法(或光谱共焦法)基本原理的物理制约,特别是光与被测物表面相互作用的复杂性,使得实际精度高度依赖于测量条件与对象特性。
3、有意义的精度对比多元化紧密结合具体应用场景,不同场景对精度各分量的权重、测量范围、响应速度及环境稳定性的要求差异巨大,脱离应用背景的参数列表参考价值有限。
4、有效的评测应建立分层实践框架,从明确被测对象特征入手,系统化地测试静态精度、表面敏感性、动态重复性、频率响应及长期稳定性,方能优秀评估传感器在实际工作中的真实精度表现。